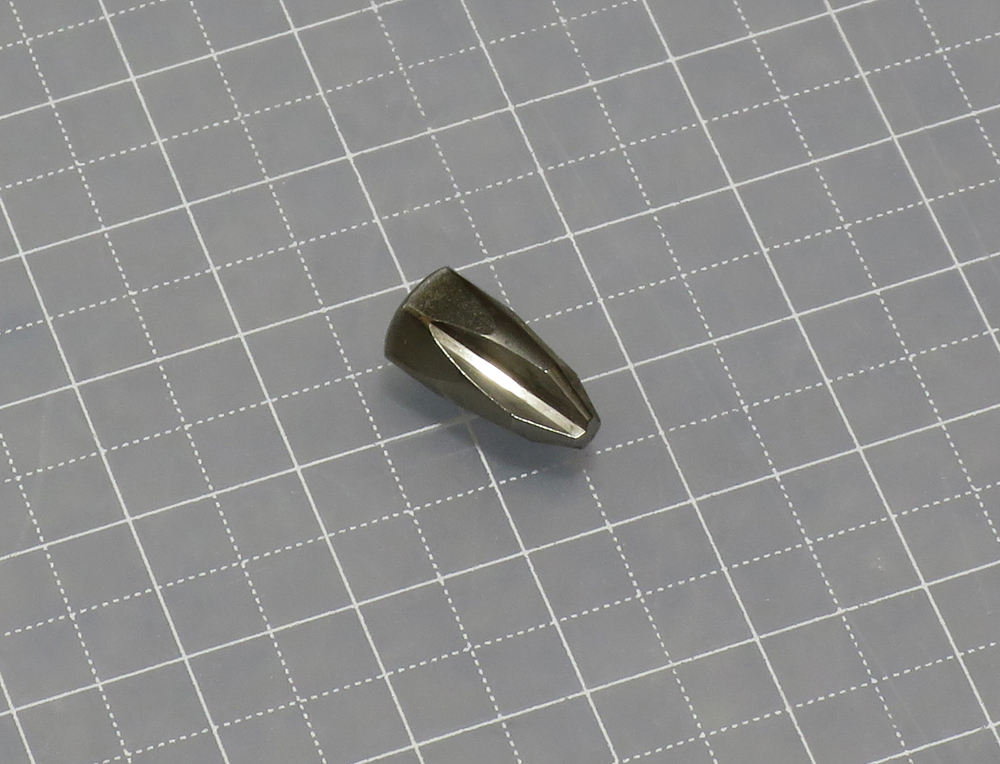
ハイスピードドライバ(HSD)の最大の特徴は、ドライバ中央部に設けられたグリップ(早回し用把持部)と、その非対称の突出形状にあります。

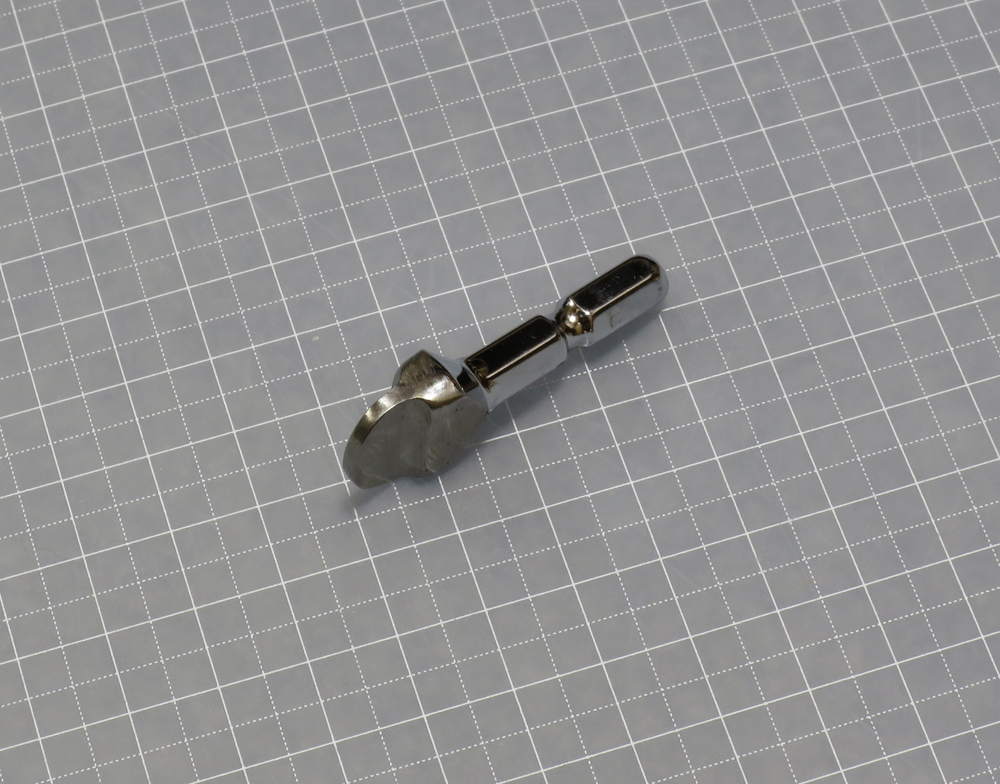
上掲画像右側は、整形を終わった段階の部材、左側は、ベアリング接着用の作業穴を開けた段階のものです。
ドライバの構想の初期段階では、同軸状(同心円状)のグリップ形状で試作していたのですが、いずれもドライバ軸(早回し部)を回しにくい、という本質的欠陥を持っていました。あるとき、グリップを突出形状を持つ非対称形のものにしてみると、格段に回しやすくなりました。
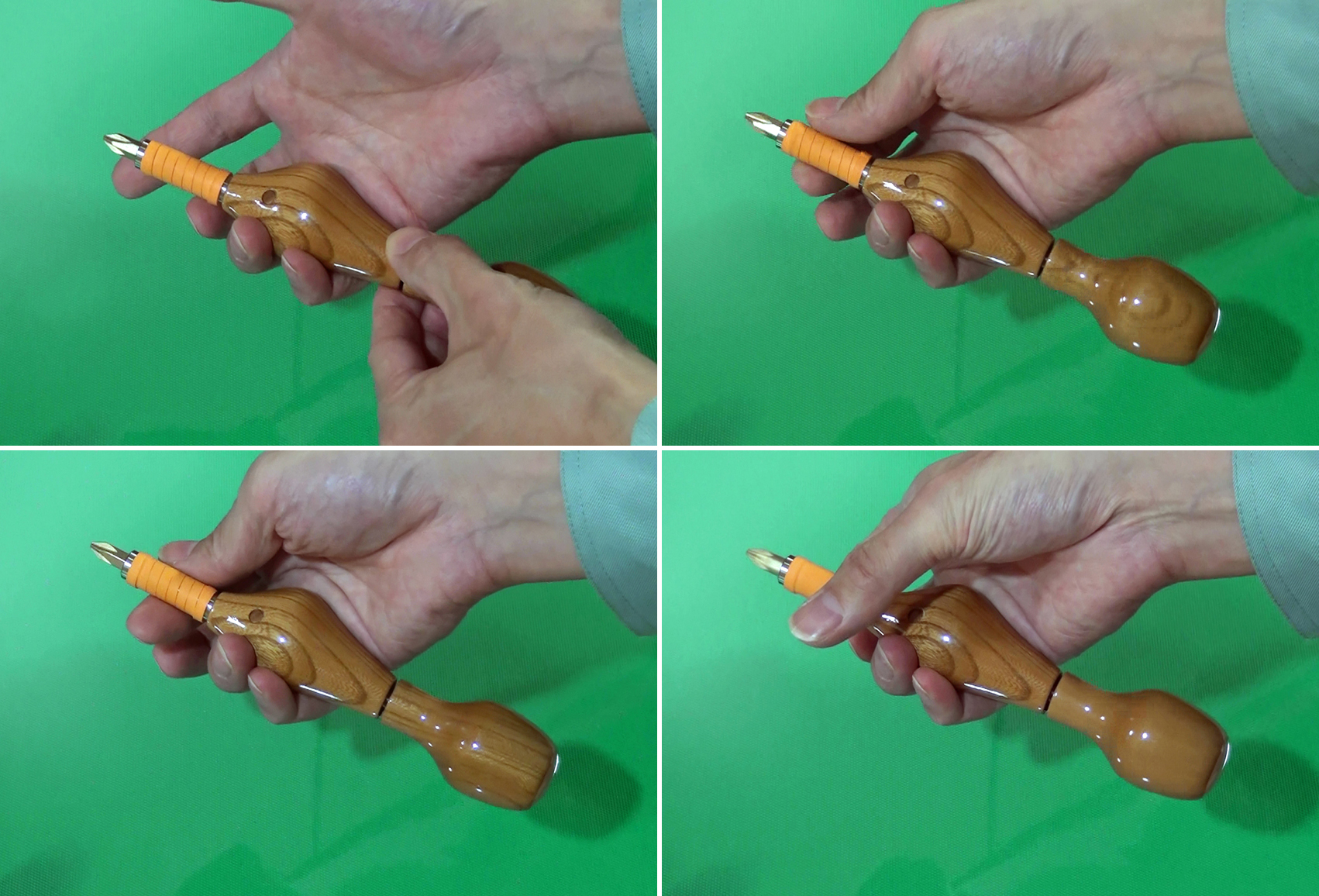
この非対称の突出が、早回しポジションにおいて、ドライバを自然に把持しつつ、早回し部の操作を容易にして、ドライバ軸の著しい高回転を可能にします。
上掲画像のように、突出部を手のひらの中指付近(厳密性は要しません)に当てて把持することにより、親指・人差し指の付け根がドライバ軸から適度に遠ざけられ、親指・人差し指の動きに自由度(ゆとり)が生じます。その結果、早回し部の操作が円滑容易になり、無理のない動作で、ドライバ軸の高速回転が可能になります。
グリップに突出部がないと、指とドライバ軸が接近しすぎて、早回し動作が非常に窮屈になります。
他方、同心円状に膨らんだ形状にすると、グリップが太くなりすぎてドライバの把持が困難です。
一方向にのみ顕著な突出を持つグリップ形状が、ドライバの自然で柔軟な把持を可能にしつつ、手指の自由な動きを可能にし、ドライバ軸の高速回転を生み出します。
また、グリップを把持する早回しのポジションにおいて、柄はフリーの状態なので、これがフライホイールとなって高速回転が持続し、一ひねりで大きな回転量を得ることができます。
このグリップを逆向きに把持すると、逆手持ち(リバースポジション)によるドライバ操作が可能になります。

リバースポジション操作ができることで、さまざまな状況のネジへのアクセス性能が飛躍的に高まることは前出のとおりです。
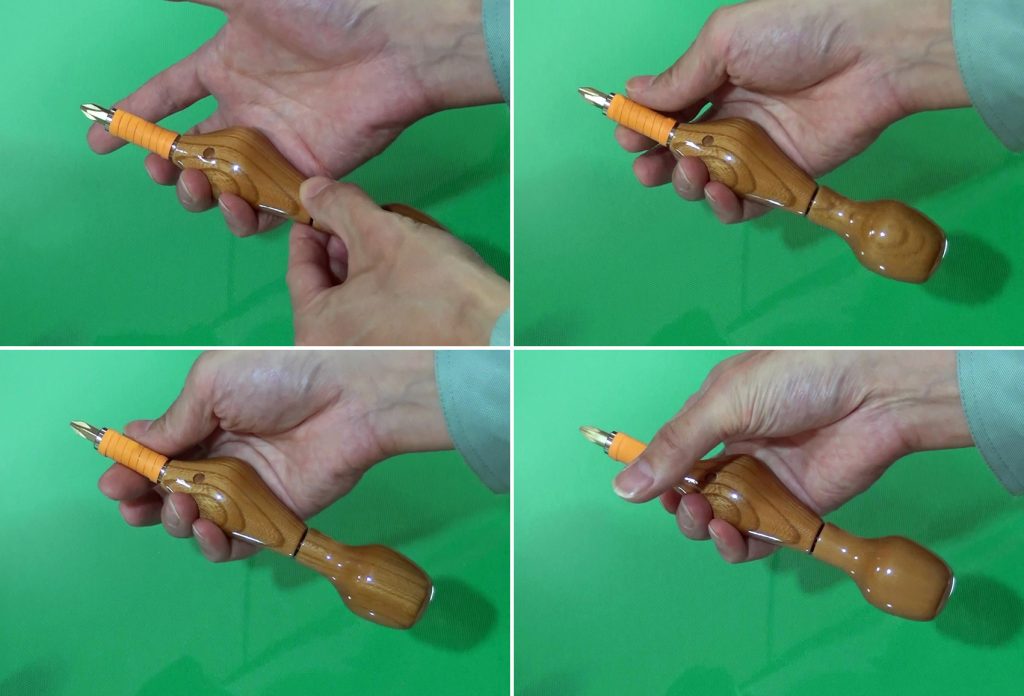
また、柄を握った本締めポジションにおいて、親指、人差し指の先端をグリップにかけることにより、柄から手を離してポジションを戻すことができるため、ラチェットドライバのような反復動作によるドライバ操作が可能になります。
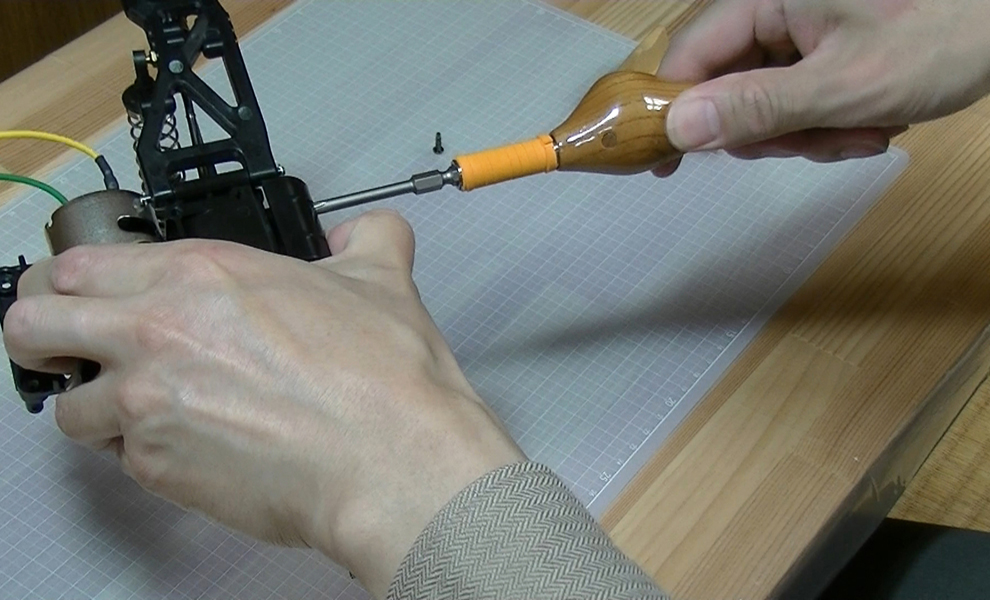
上掲画像は、HSD詳説4 ~その他実演集~ の、「小型メカ・ロボット系部材への適用」の動画(HighSpeed Driver 12)からのキャプチャです。
この操作は、適用できる場面が多く、ドライバの軽快な操作性を高めます。
反復動作でのドライバ操作により、片手のみでのネジの締め/弛めが簡便かつ安定した操作で可能になります。
また、グリップは、回転運動するドライバ軸に対して、相対的に「動かない」場所ですので、末端部にストラップホールを設けるなどして、ストラップやワイヤを取り付け可能とすることができます。ワイヤ等の装着により、高所での作業などにおいて、ドライバ本体の落下防止を図ることができます。

このように、ドライバ中央部に、突出形状を持つ非対称形のグリップを設けることで、いくつもの効果が生じ、従来のドライバにはない多彩な利便性をもたらします。
デザイン的にも、戦闘機のノーズのようなイメージもあり、なかなか面白いと思います。
詳しくは、ハイスピード・ドライバの詳説ページ(HSD詳説1以下)を動画共々ご参照いただければ幸いです。